
- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Drooninavigatsiooni pettuse tehnoloogia
Droonide sihikule suunatud navigatsioonipettus viitab üldiselt teatud tehniliste vahendite kasutamisele kunstlikult seatud valeohu navigatsiooniteabe süstimiseks illegaalsetesse droonidesse, mille tulemusena määrab drooni enda satelliitnavigatsioonisüsteem valesti selle asukohta ning teeb seega ebaõiget marsruudi planeerimist ja lennujuhtimist, saavutades seeläbi drooni ärajuhtimise või selleks ettenähtud kohas sundmaandumise eesmärk. Tulenevalt asjaolust, et mainstream droonid kasutavad praeguGlobaalne satelliitnavigatsioonisüsteem(GNSS) nende peamise navigatsiooniteabe allikana võib navigatsioonipettuse tehnoloogia mõjutada peaaegu kõiki droone, eriti tsiviildroone, ja sellel on hea rakendatavus. Praktikas väljastavad maapealsed droonide navigatsioonijuhtimisseadmed üldiselt pseudo-navigatsioonisignaale, millel on teatav sarnasus tõelise drooni GNSS-signaaliga, sundides asjaomaseid kasutajaid selliseid pseudo-navigatsioonisignaale vastuvõtvas terminalis vastu võtma ja arvutama, mistõttu droon saab valesid signaale. asukoha, kiiruse ja aja teave varjatud tingimustes ega suuda seda tõhusalt tuvastada. Tuleb märkida, et navigatsioonipettus erineb navigatsioonihäiretest. Navigatsiooni summutamise häired kasutavad tavaliselt erinevat tüüpi summutussignaalide edastamiseks suure võimsusega segajaid, mistõttu sihtvastuvõtja ei saa tavalisi navigeerimissignaale vastu võtta ja kasutajad ei saa navigeerimis-, positsioneerimis- ja ajamõõtmise tulemusi, mille tulemuseks on navigatsioonisüsteemi kättesaamatus. Kuna navigatsioonipettus ei nõua sageli liiga tugevat edastusvõimsust, on hästi varjatud ja võib teatud määral suunata asjassepuutuvaid kasutajaid valesti navigeerima, annab see ka navigeerimispettuse praktikas häid rakendusi.


Praegu on droonide jaoks kaks peamist navigatsioonipettuse tehnoloogiat:
1) Pettuse edastamine
Nagu nimigi viitab, viitab edasisuunaline pettus GNSS-vastuvõtja paigutamisele pettatava sihtmärgi ümber, tegeliku GNSS-signaali salvestamisele ja sihtmärgile edastamisele, et saavutada pettuse efekt. Üldiselt võib signaali saabumise viivituste vältimatu esinemise tõttu signaali vastuvõtmisel, salvestamisel, töötlemisel ja edastamisel jagada edastamise häired otseseks edastamise pettuseks ja viivitusega edastamise pettuseks, lähtudes inimese viivitusest. Tulenevalt asjaolust, et edasisuunas pettuse segamine suunab otse reaalse signaali edasi, tähendab see, et seni, kuni praegust signaali saab vastu võtta, saab pettust läbi viia. Seetõttu ei ole vaja signaali pseudokoodi struktuuri ette teada, eriti ilma GPS M (Y) koodi konkreetsetest teostusdetailidest mõistmata. Seetõttu saab sõjaväe GPS-signaale otseselt petta. Tulenevalt aga sellest, et edastatud pettussignaali vastuvõtjani jõudmise viivitus on alati suurem kui reaalse signaali saabumise viivitus. Kuna pseudokoodi struktuuri ja ainult pseudokauguse mõõtmise väärtust ei ole võimalik pettusprotsessi ajal muuta, on samaaegse edasisuunalise pettuse häirete juhtimise paindlikkus suhteliselt halb, mis nõuab sageli keerukamaid edasiviivituse juhtimisstrateegiaid ja millel on ka teatud piirangud. edastamisseadmete juurutamise asukoht. Vastuvõtjate puhul, mis on juba saavutanud GPS-signaalide stabiilse jälgimise, on edasisuunaline pettushäire efektiivne ainult siis, kui edasisuunalise signaali ja otsesignaali vaheline viivitus sihtvastuvõtja antenni faasikeskmes on selle pseudokoodi faasi tõttu väiksem kui üks kiip. kell jääb tegelikust signaalist maha. Lisaks on uuringud näidanud, et kuna GPS-vastuvõtjad võtavad tavaliselt vastu mitut satelliidisignaali (tavaliselt rohkem kui 10 kanalit), on sageli vaja pettuse ajal vastu võtta ja edastada mitu satelliidi signaali. Praktikas on aga nii, et kui edastamiseks kasutatakse ühe jaama ja ühe antenni meetodit, on sageli võimatu korraga edastada rohkem kui nelja kanalit (välja arvatud neli kanalit) satelliidisignaale ning ühes edastamisjaamas on vaja edastada mitu signaali, Sageli on palju edastamisjaamu, mistõttu on hõlpsasti tuvastatavad ka edastamise võltsimissignaalid. Seetõttu on edasisuunamise võltsimise kasutamine praktikas sageli piiratud.


(2) Generatiivne pettus
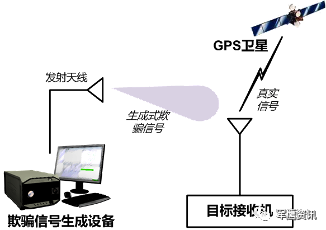
Generatiivse pettuse põhiprintsiip on kasutada pettusseadmeid, et arvutada reaalajas välja GNSS-signaali vajalikud parameetrid, nagu koodi faasi viivitus, kandja Doppler, navigatsiooniteade jne, mida kasutaja peab eelnevalt kindlaksmääratud eeldatavas kasutaja asukohas vastu võtma. . Selle põhjal genereeritakse selles punktis vale GNSS-signaal, mis kiirgatakse läbi saateantenni pettusobjektile, maskeerides tõelise GNSS-signaali valesignaali võimsuse eelisega, muutes selle järk-järgult jälgima ja hõivama määratud pseudokoodi faasi ning pettussignaali Doppleri kandja, et pettatav sihtmärk saaks valesid pseudokauguse mõõteväärtusi ja arvutaks seejärel vale asukohateabe, saavutades lõpuks pettuse eesmärgi. Selle meetodi põhiprintsiip on näidatud järgmisel joonisel:
Generatiivne pettus nõuab GNSS-signaalide (nt pseudokoodistruktuurid, navigatsioonisõnumid jne) andmete ja sagedusstruktuuri täielikku mõistmist, mistõttu on P (Y) koodi signaalide generatiivse pettuse rakendamine keeruline. Kuna generatiivne pettuse segamine kasutab pettussignaalide genereerimiseks oma seadet ja ei tugine GNSS-süsteemile, saab pettuse osapool vabalt määrata navigatsiooniteate ja signaali edastamise aja, mis võimaldab pettussignaalil jõuda vastuvõtjani kas hilinemisega. või tegelikust signaalist ees. Seega võivad generatiivsed häired sihtmärk-vastuvõtjat petta erinevate vahenditega, nagu saabumise eksperimentaalsete mõõtmisväärtuste muutmine ja satelliidi efemeriidide/almanahhide rikkumine. Lisaks, kuna GNSS-signaalid on tegelikult otsese jada hajaspektri signaalid, mis korduvad teatud koodiperioodi jooksul, on uuringud näidanud, et generatiivsed pettussignaalid suudavad automaatselt sobitada koodi faasi tegeliku signaaliga pikima pseudokoodiperioodi jooksul (1 ms GPS L1 signaalide puhul ) ja tõmmake vastuvõtja pseudokoodi jälgimissilmust, et jälgida pettussignaali tegelikust signaalist veidi suurema võimsusega. Samal ajal, kui pettus ei õnnestu ühe pseudokooditsükli jooksul, võib pettussignaal pettussignaali pseudokoodi tsüklilise kordumise tõttu automaatselt rakendada veojõudu ka järgmises pseudokooditsüklis kuni sihtvastuvõtjani. on edukalt juhendatud. Kui pettesignaal tõmbab edukalt sihtvastuvõtja pseudokoodi jälgimissilmuse, saab segav osapool kontrollida sihtmärgi vastuvõtja ajastust ja asukoha määramist, reguleerides edastatud pettussignaali pseudokoodi faasi, saavutades seeläbi sihtmärgi petmise eesmärgi. vastuvõtja. Seetõttu ei esita see meetod vastuvõtja praegusele olekule kõrgeid nõudeid. See võib petta nii püüdmisolekus vastuvõtjat kui ka püsiseisundi jälgimisolekus vastuvõtjat. Seetõttu on generatiivse pettuse praktilisus sageli tugevam.
Tänu satelliitnavigatsioonisüsteemide sügavale rakendamisele ühiskonnaelu erinevates aspektides ja sõjalistes rakendustes võivad satelliitnavigatsiooni terminalid, mis võtavad vastu valesignaale ning saavad valesid ajastuse ja asukoha määramise tulemusi, kaasa tuua katastroofilisi tagajärgi. Seetõttu suureneb pidevalt navigatsioonipettustehnoloogiat kasutavate droonide vastumeetmete arv. 4. detsembril 2011 väitsid Iraani õhutõrjejõud, et kasutasid pettetehnoloogiat USA mehitamata luurelennuki RQ-170 tabamiseks piki riigi idapiiri. Kui see aruanne vastab tõele, on see esimene navigatsioonipettuse tehnoloogia rakendus mehitamata õhusõidukite vastumeetmetes. Meedia teadete kohaselt on Venemaa elektroonilise sõjapidamise tehnoloogia ja varustuse suurriigina suure tõenäosusega viimastel aastatel GPS-i sihtmärgiks laialdaselt kasutanud pettustehnoloogiat. USA mittetulundusühingu C4ADS andmetel on Venemaal viimastel aastatel toimunud ligi 10 000 erinevat GPS-i pettusjuhtumit, eriti kui Venemaa president Putin külastab tundlikke piirkondi, ilmuvad nende ümber petlikud GPS-signaalid. Lisaks teatas organisatsioon, et Moskvas, eriti Kremli lähedal, on turistid korduvalt leidnud, et nende asukohaks on määratud 32 km kaugusel asuv lennujaam. Seda Venemaa lähenemist peetakse laialdaselt kaitsemeetmena, et vältida NATO GPS-i juhitavate relvade rünnakut. Analüüs viitab sellele, et Venemaa sõjavägi on suutnud korduvalt tõrjuda droonide kobarrünnakuid, mis on suunatud tema sõjaväebaasidele Süürias, võib-olla osalise GPS-i pettetehnoloogia kasutamise tõttu.